www.wernerhirsch.de
Elektronikprojekte
Einfacher DDS Signalgenerator /
Frequenzzähler
- DDS-Signalgenerator 0,1Hz bis maximal 80kHz - Signalformen Sinus, Dreieck, Sägezahn, Rechteck und TTL-Ausgang - VCO-/Wobbel/Burst Funktion - Frequenzzähler 0,25Hz bis ca. 100MHz (Analog und TTL) - Materialkosten ca. 50 EUREinführung/Voraussetzungen
Das hier beschriebene Gerät beinhaltet die Funktion eines DDS-Signalgenerators (Sinus, Dreieck, Sägezahn, Rechteck) von ca. 0,1Hz bis maximal 80kHz für den Audioeinsatz und eines Frequenzzählers mit einem Messbereich von 0,25Hz bis ca. 100MHz für analoge und TTL Signale. Für die Schaltung wird ein Mikrocontroller PIC18F25K22 verwendet, der mit der HEX-Datei FZG_Einfach_P18F25K22.hex programmiert werden muss. Die HEX-Datei sowie eine Assembler-Datei findet ihr im Downloadordner am Ende der Seite. Der PIC18F25K22 wird leider nur von wenigen Programmiergeräten unterstützt, daher findet ihr im Downloadbereich ein ähnliches Gerät mit dem PIC18F2550, der mit einem einfachen Selbstbau Gerät (JDM-Programmer) programmiert werden kann. Voraussetzung hierfür ist ein PC mit "echter" 9-poliger RS232 Schnittstelle (USB auf RS232 Adapter funktionieren in der Regel nicht). Für den Vorverstärker des Frequenzzählers wird der Chip TLV3502 verwendet, der leider nur als SMD Version im SO8 Gehäuse mit einem Pin Abstand von 1,27mm verfügbar ist. Ich habe den Chip auf eine Adapterplatine gelötet um auf das 2,54mm Raster der von mir verwendeten Streifenrasterplatinen zu kommen. Für das Löten des Chips sind eine ruhige Hand, gute Augen (ggf. eine gute Lupe mit 3-5 facher Vergrößerung), viel Licht und ein Lötkolben mit feiner Spitze erforderlich.Beschreibung der Schaltung
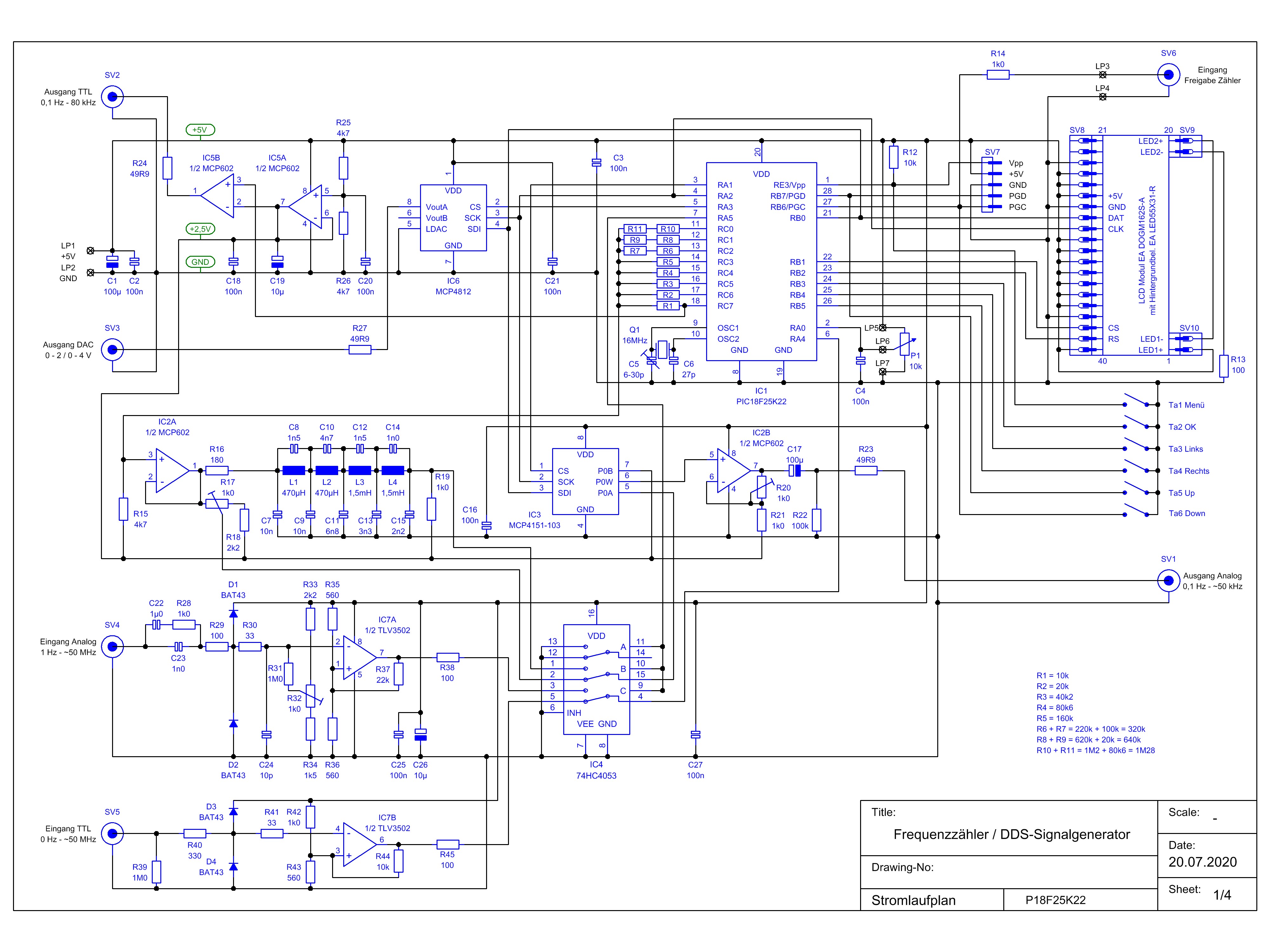
Die Elektronik besteht im Wesentlichen aus dem DDS Signalgenerator, Eingabetaster, Display und dem Frequenzzähler mit 2-Kanal Eingangswahl (TTL, Analog). Das "Herz" der Schaltung ist der Mikrocontroller PIC18F25K22 (IC1) mit 16MHz Quarzoszillator. Das Programm wird mittels der Datei FZG_Einfach_P18F25K22.hex in den Mikrocontroller geladen. Die Datei befindet sich in dem Download Ordner am Ende der Seite. Wer noch Änderungen am Programm vornehmen möchte, findet in dem Ordner auch die Assembler- Datei FZG_Einfach_P18F25K22.asm. Über die 5-polige Stiftleiste SV7 kann der PIC im eingebauten Zustand in der Schaltung programmiert werden (ICSP = In Circuit Serial Programming), ich empfehle jedoch die Programmierung im Programmiergerät. Die Genauigkeit der erzeugten DDS Frequenzen und die Genauigkeit der Frequenzmessung hängt im wesentlichen auch von der Genauigkeit des Quarzoszillators (Q1,C5,C6) ab. Über C5 lässt sich die Frequenz um einige ppm verändern. Eine Methode zum Abgleich findet sich in der Bedienungsanleitung im Downloadordner.DDS Signalgenerator
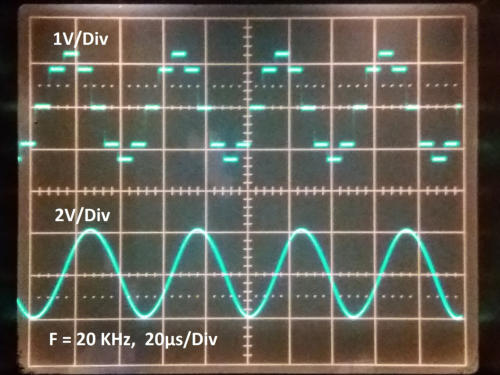
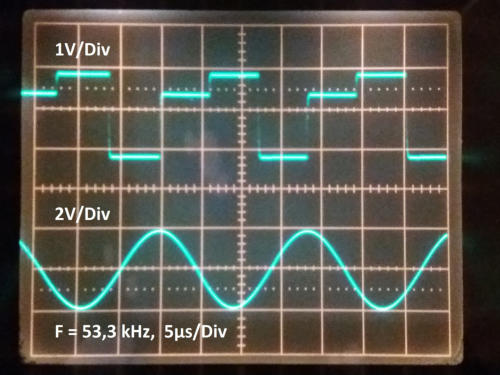
Die DDS Signale werden innerhalb des Mikrocontrollers berechnet und an PORTC (Pins 11-18) mit 8 Bit Auflösung ausgegeben (binär: 00000000 bis 11111111, dezimal 0 bis 255). Jeder Ausgangspin ist mit einem Widerstand versehen, der am anderen Ende mit den anderen Widerständen verbunden ist und den Ausgang des DAC (Digital Analog Converter) bilden. Die Widerstandswerte sind umgekehrt proportional zur Wertigkeit der einzelnen Bits: Ausgang Bit Wertigkeit Widerstand RC0 0 (LSB) 2^0=1 1280kΩ (LSB = least significant bit) RC1 1 2^1=2 640kΩ RC2 2 2^2=4 320kΩ RC3 3 2^3=8 160kΩ RC4 4 2^4=16 80kΩ RC5 5 2^5=32 40kΩ RC6 6 2^6=64 20kΩ RC7 7 (MSB) 2^7=128 10kΩ (MSB = most significant bit) Die Spannung am (unbelasteten) Ausgang des DAC Vout ist proportional dem an PORTC ausgegebenen Wert W: Vout = 5V x W / 255 Ist der Wert z.B. 1 (binär: MSB 00000001 LSB) ergibt sich die Spannung zu: Vout = 5V x 1 / 255 = 0,0196V Die 0-5V Ausgangsspannung des DAC sind für die nachfolgenden Komponenten zu hoch und werden über R15 auf eine Amplitude von ca. 2,4V reduziert. R15 hängt an einer Referenzspannung Vref von 2,5 V, die über IC5A erzeugt wird. Somit beträgt die DAC Spannung +/- 1,2V bezogen auf Vref. Über IC2A, das als Impedanzwandler beschaltet ist, durchläuft das Signal einen elliptischen Filter 9ter Ordnung, bestehend aus R16, L1-L4, C7-C15 und R19. Der Filter dient der Glättung des stufenförmigen (digitalen) Sinus -Signals. Die folgenden Bilder zeigen die Wellenformen vor dem Filter (oben) und am Analogausgang (unten) für Sinussignale von 20kHz und 53,3kHz. Der Ausgang des Filters wird an Pin1 des 3x2-Kanal Datenmultiplexer 74HC4053 (IC4) geführt. Für Rechtecksignale kann der Filter umgangen werden. Über den Trimmer R17 und R18 wird das Signal auf die gleiche Amplitude wie das gefilterte Signal eingestellt und an Pin2 von IC4 geführt. Bei einem Low auf den Steuereingängen Pin 9-11 wird das ungefilterte Signal auf Pin 15 durchgeschaltet, bei einem High auf den Steuereingängen das gefilterte Signal. Von Pin15 wird das Signal auf Pin5 des Digitalpotentiometers MCP4151-103 (IC3) geführt. Das Digitalpoti hat eine lineare Kennlinie mit 256 möglichen Positionen. Um den Signalpegel in dB darstellen zu können, wurden die Positionen gewählt, die einer logarithmischen Kennlinie am nächsten kommen. Von 0db bis -27dB beträgt die Auflösung 1dB. Danach sinkt die Auflösung auf 3dB: -30dB, -33dB, -36dB, -39dB, -42dB. Der Letzte Sprung beträgt 6dB auf -48dB. Pin7 von IC3 liegt auf der 2,5V Referenzspannung. Die Ansteuerung des Digitalpoti erfolgt seriell über Pin2 (SCK=clock) und Pin3 (SDI=data). Für die Datenübertragung wird Pin1 (CS=Chip Select) auf Masse gelegt. Vom "Schleifer" (Pin6) wird das Signal auf den +Eingang (Pin5) von IC2B geführt. Die Verstärkung von IC2B kann über den Trimmer R20 zwischen 1 und 2 eingestellt werden, sodass Ausgangsspannungen von 2,1 bis 4,2 Vpp möglich sind. Das Ausgangssignal gelangt über C17 und R23 an die Ausgangsbuchse SV1. Für den TTL Ausgang wird das MSB des DAC (Pin18 von IC1) abgenommen und an den +Eingang (Pin3) von IC5B geleitet. Der -Eingang (Pin2) liegt auf der 2,5V Referenzspannung. IC5B ist als Komparator beschaltet. Allerdings ist die Flankensteilheit nicht besonders gut. In der Betriebsart Wobbel und VCO wird die Frequenz als Spannungssignal am Ausgang VoutA (Pin8) eines weiteren DAC MCP4812 (IC6) ausgegeben. Die Spannung ist proportional der Frequenz bzw. dem Logarithmus der Frequenz. Über den Menüpunkt 4.3. DAC Gain kann als Ausgangsspannung 0-2V oder 0-4V gewählt werden. Die Ansteuerung des DAC erfolgt seriell über Pin3 (SCK=clock) und Pin4 (SDI=data). Für die Datenübertragung wird Pin2 (CS=Chip Select) auf Masse gelegt. In den Betriebsarten VCO und Wobbel wird die untere Frequenz Fu festgelegt, z.B. 20Hz. Die obere Frequenz Fo ergibt sich aus der gewählten Anzahl Dekaden: 1 Dekade: Fo = 10 x Fu z.B. Fo= 10 x 20Hz = 200Hz 2 Dekaden: Fo = 100 x Fu z.B. Fo= 100 x 20Hz = 2.000Hz 3 Dekaden: Fo = 1.000 x Fu z.B. Fo= 1.000 x 20Hz = 20.000Hz Der Frequenzverlauf zwischen Fu und Fo kann linear oder logarithmisch gewählt werden. Für die logarithmische Kennlinie ist eine Logarithmentabelle mit 256 Werten hinterlegt. Zwischenwerte werden linear interpoliert. In der Betriebsart Wobbel kann zusätzlich die Anzahl der Schritte gewählt werden, in denen der Frequenzbereich durchfahren wird. Die Anzahl kann 32, 64, 128, 256, 512 oder 1024 Schritte betragen. Diese Schritte können entweder manuell über die Up/Down Taster oder automatisch über eine wählbare Zeit/Schritt abgefahren werden. Die Zeit pro Schritt (dt) kann 1ms, 2ms, 5ms, 10ms, 20ms, 50ms, 0,1s, 0,2s, 0,5s, 1s oder 2s betragen. Das Frequenzsignal kann entweder kontinuierlich oder als "Burst" ausgegeben werden. Bei der Wahl "Burst" wird das Signal mit 1, 2, 4, 8, 16 oder 32 Perioden ausgegeben, abhängig davon wie viele Perioden in die Hälfte der gewählten Zeit pro Schritt (dt) passen. In der zweiten Hälfte, bzw. dem Rest von dt wird kein Signal ausgegeben. Ich verwende diese Betriebsart zur reflektionsarmen Frequenzgangmessung an Lautsprechern im Wohnraum: Bei einer Deckenhöhe von 2,5m, Platzierung des Lautsprechers/Mikrofons auf 1,25m und 1m Mikrofonabstand ergibt sich eine Laufzeitdifferenz zwischen direktem Schall und reflektiertem Schall von 5ms, d.h. man hat 5ms reflektionsarme Messzeit. Unter Berücksichtigung der Einschwingzeit sind so Frequenzgangmessungen ab ca. 200Hz aufwärts möglich.Erzeugung der DDS Signale
IIm ersten Schritt wird ein Frequenzregisterwert gemäß folgender Gleichung berechnet:
FreqReg = Fout x 16.777.216 / Fmclk
FreqReg
= 24-Bit Frequenzregisterwert
Fout
= Frequenz, die an PORTC ausgegeben wird
16.777.216
= 2 hoch 24 = Konstante
Fmclk
= Frequenz des DDS Taktgenerators, (160kHz)
Soll z.B. eine Frequenz von 1.000 Hz erzeugt werden, berechnet sich FreqReg zu:
FreqReg = 1.000Hz x 16.777.216 / 160.000Hz = 104.858 (dezimal, gerundet)
Damit ist die Frequenz nicht exakt 1.000,000Hz, sondern: Fout = 104.858 x 160.000Hz / 16.777.216 = 1.000,004Hz
Die Frequenzauflösung beträgt : 1 x 160.000Hz / 16.777.216 = 0,0095Hz
Der berechnete Frequenzregisterwert FreqReg wird bei jedem 100sten Takt des Mikrocontrollers (Jeder 100ste Takt
entspricht bei 16MHz einer DDS Taktfrequenz Fmclk von 160KHz) zu einem ebenfalls 24Bit (MSB:Bit23 bis LSB:Bit0)
langem Phasenregister addiert. Das Phasenregister entspricht dem Kreisumfang 2π mit 24 Bit Auflösung.
Für Rechtecksignale wird nur das MSB des Phasenregisters (Bit23) ausgewertet. Von 0 bis π (1ste und 2te Quadrant) ist
das MSB = 0 (DAC=>0x00), von π bis 2π (3te und 4te Quadrant) ist das MSB = 1 (DAC=>0xFF).
Für Sägezahnsignale entsprechen die 8 höchsten Bits (Bit23 bis Bit16) direkt dem DAC Ausgangswert.
Bei Dreieckssignalen definiert das MSB (Bit23), ob die Kurve ansteigt (0 bis π) oder fällt (π bis 2π). Bit22 bis Bit15 ergeben
bei steigender Kurve den DAC Ausgangswert, bei fallender Kurve werden
Bit22 bis Bit15 von 255 subtrahiert und am DAC ausgegeben.
Bei Sinussignalen kennzeichnen Bit23 und Bit22 den Quadranten: 00 = 1ste Quadrant, 01 = 2te Quadrant, 10 = 3te
Quadrant, 11 = 4te Quadrant.
Mittels der nächsten 8Bit (Bit21 bis Bit14) wird der entsprechende Sinuswert aus einer Sinustabelle mit Werten von 0 bis
π/2 (entspricht 0-90°) geholt. Im 1sten Quadrant wird der Wert direkt am DAC ausgegeben. Im 2ten Quadrant vorher
vertikal gespiegelt, im 3ten Quadrant horizontal und im 4ten Quadrant horizontal und vertikal gespiegelt.
Damit alle Signale mit der positiven Flanke starten, wird die Phase des Rechteck- und Sägezahnsignals um 180° und die
Phase des Dreiecksignals um 90° gedreht.
Wie oben erwähnt, erfolgt das Aufaddieren des Phasenregisters und Ausgabe des Wertes am DAC bei jedem 100sten Takt
des Mikrocontrollers in einer Interrupt Routine. Bei Sinussignalen werden dafür 45 Takte benötigt, in den verbleibenden 55
Takten werden die nicht zeitkritischen Punkte des Programms abgearbeitet, wie z.B. Berechnungen der Frequenzregister-
/Timer Werte, Anzeige auf dem Display usw.
Frequenzzähler
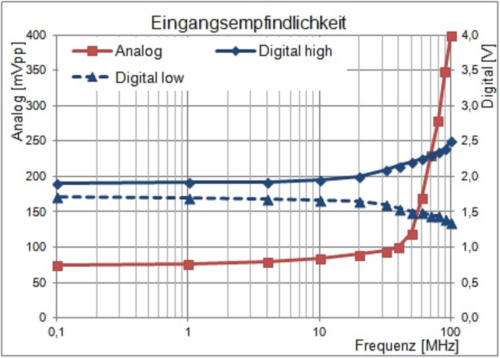
Das zu messende Eingangssignal liegt an Pin 6 (RA4) des Mikrocontrollers. Für die Frequenz- und Periodenmessung wird die Frequenz im ersten Schritt grob über 1msek an Pin RA4 gemessen. Intern kann der PIC nur Frequenzen bis ca. 10MHz zählen, die Frequenz an RA4 kann jedoch vor dem eigentlichen Zählvorgang intern vorgeteilt werden, sodass wesentlich höhere Frequenzen gemessen werden können. Die Grobmessung erfolgt mit einem Vorteilerfaktor von 8. Nach Auswertung der Grobmessung erfolgt die eigentliche Frequenzmessung über 1sek mit folgenden Vorteilerfaktoren: Grobmessung: >64MHz 32-64MHz 16-32MHz 8-16MHz <8MHz Vorteilerfaktor: 16 8 4 2 1 Die Frequenzmessung hat eine Genauigkeit von ca. 2ppm für Frequenzen >1MHz, bei 200kHz beträgt die Genauigkeit ca. 10 ppm. Ergibt die Grobmessung eine Frequenz kleiner ca. 200kHz wird eine kombinierte Frequenz-/Periodenmessung durchgeführt. Hierfür wird der interne Timer1 mit der positiven Flanke des Eingangssignals an Pin RA4 synchronisiert und über ca. 1s die positiven Flanken gezählt. Nach Ablauf der Sekunde wird bei der nächsten positiven Flanke an Pin RA4 der Timer1 gestoppt. Somit erhält man für eine genaue Anzahl n positiver Flanken die Zeit t mit einer Genauigkeit von ca. 2ppm und damit auch die Frequenz (f=n/t) bzw. die Periode (p=t/n) nach der Division mit einer Genauigkeit von ca.2ppm. (Alle Fehlerangaben zuzüglich Fehler des Quarzoszillators). Wird nach ca. 4,2 Sekunden (entspricht 0,24Hz) keine positive Flanke detektiert, wird die Messung abgebrochen. Je nach gewähltem Messmodus wird die Frequenz in Periode (p=1/f) bzw. Periode in Frequenz (f=1/p) umgerechnet. Die Anzeige auf dem Display erfolgt jeweils mit 7 Stellen, das ist etwas mehr als die Grundgenauigkeit der Messung. Der interne Vorteilerfaktor sowie der gewählte Messeingang werden in der unteren linken Ecke des Displays angezeigt. In der Betriebsart “Zähler“ werden die positiven Flanken an RA4 aufsummiert, wenn Pin27 (RB6) Low ist. Geht RB6 auf High, wird die Zählung gestoppt. Beim nächsten Low von RB6 wird der Zähler auf 0 gesetzt und die Zählung gestartet. RB6 wird normalerweise durch einen internen Pull-up Widerstand auf High gehalten und kann durch Taster Ta6 (Down), einen Schließer Kontakt oder einen npn Transistor auf Low gezogen werden. Die maximale Zählfrequenz an RA4 beträgt ca. 200kHz. Über den 3x2-Kanal Datenmultiplexer 74HC4053 (IC4) kann einer von 2 vorgesehenen Messeingängen zum PIC durchgeschaltet werden. Die Umschaltung erfolgt über ein High/Low an den Pins 9 bis 11. Für die Eingangssignale sind Eingangsstufen mit dem 2-fach High Speed Komparator TLV3502 vorgesehen. Analoge Eingangssignale gelangen über Buchse SV4, C22, R28,R29 und R30, bzw. bei Frequenzen >ca. 160kHz über C23/R29/R30 an den invertierenden Eingang (Pin2) von IC7A. Die Widerstände R28/R29/R30 dienen dabei in Verbindung mit D1/D2 dem Schutz des Eingangs vor Überspannungen. Bei Eingangssignalen bis +/-2,5V beträgt der Eingangswiderstand ca. 1MΩ (R31). Bei größeren Eingangssignalen werden diese durch die Dioden D1/D2 begrenzt und der Strom gegen Masse bzw. die positive Versorgungsspannung abgeleitet. Dabei darf der Diodenstrom die Stromaufnahme der Schaltung von ca. 40mA nicht übersteigen. Bei niedrigen Frequenzen ergibt sich somit eine maximal zulässige Signalamplitude von +/-42V, bei hochfrequenten Signalen von +/-6V. Über R32 wird der Arbeitspunkt von V+/2 = 2,5V an Pin 2 eingestellt (V+ = positive Versorgungsspannung, V+ = 5V). Der nichtinvertierende Eingang (Pin1) wird ebenfalls auf V+/2 über den Spannungsteiler R35/R36 eingestellt. Der TLV3502 hat eine interne Hysterese von 6mV. Das ist in der Regel zu wenig, da schon geringes Rauschen des Eingangssignals die Messung verfälschen würde. Deshalb wird die Hysterese durch den Rückkoppelwiderstand R37 auf ca. 69mV erhöht. Die Hysterese berechnet sich zu: H = To - Tu + 0,006V Mit: H = Hysterese, To = obere Triggerspannung, Tu = untere Triggerspannung To = V+ / ( 1 + 1 / ( Ru/Rr + Ru/Ro )) Tu = V+ / ( 1 + Ro/Rr + Ro/Ru )) Mit: Ro = oberer Widerstand des Spannungsteilers Ru = unterer Widerstand des Spannungsteilers Rr = Rückkoppelwiderstand Wird R37 auf z.B. 47kΩ erhöht, sinkt die Hysterese auf ca. 36mV. Der 10pf Kondensator C24 ist optional und reduziert die Schwingneigung bei offenem Messeingang und geringer Hysterese. Ich benötige ihn nicht. Das TTL Signal gelangt über Buchse SV5, R40 und R41an den invertierenden Eingang (Pin4) von IC7B . R40 und R41 in Verbindung mit D3/D4 schützen IC7 vor Überspannungen. Auch hier liegt der nichtinvertierende Eingang (Pin3) an einem Spannungsteiler (R42/R43) mit Rückkoppelwiderstand (R44). Die obere Triggerschwelle beträgt 1,91V, die untere Triggerschwelle 1,73V, sodass auch noch Signalpegel von ca. 3,3V gemessen werden können. Die nebenstehende Grafik zeigt die Eingangsempfindlichkeit des Analog- und TTL Eingangs in Abhängigkeit von der Frequenz.Bedientasten / Display
Die Bedienung des Frequenzzählers und DDS Signalgenerators erfolgt über die Bedientaster Ta1-Ta6. Die Taster liegen an den Pins 24 (RB3) bis 28 (RB7) und Pin1 (RE3). RB3-RB7 sind als Eingänge geschaltet und werden durch interne Pull-Up Widerstände auf High gehalten, RE3 durch R12. Wird ein Taster gedrückt, wird der entsprechende Eingang auf Masse gezogen. Für den VCO Betrieb des DDS Generators (VCO = Voltage Controlled Oscillator ) wird an Pin2 (RA0) des PIC die Spannung am Schleifer des Potentiometers P1 mit 10 Bit Auflösung gemessen und gemäß Menüeinstellungen als Frequenz am DDS Generator ausgegeben. Zur Glättung wird der Mittelwert aus 16 Einzelmessungen gebildet, bevor die Messung intern weiterverarbeitet wird. Als Display wurde ein LCD Display EA DOGM162S-A (schwarzer Hintergrund, 2x16 Zeichen) mit roter Hintergrundbeleuchtung gewählt. Die Vorteile dieses Typs gegenüber anderen LCD Displays sind: - gute Lesbarkeit bei kleiner Baugröße - serielle Ansteuerung (nur 6 Leitungen zum Display erforderlich) - keine Spannung zur Kontrasteinstellung erforderlich (Kontrast kann über Befehle verändert werden) - Display und Hintergrundbeleuchtung getrennt, dadurch viele Kombinationen möglich. Wer es lieber mit schwarzer Schrift auf grünem Hintergrund möchte, nimmt ein EA DOGM162E-A mit Hintergrundbeleuchtung EA LED55x31-G. Für die Übertragung der Daten vom Mikrokontroller zum Display wird Pin22 von IC1 auf Low gelegt (Disp.:CS). Anschließend wird Pin23 (Disp.:RS) für einen Befehl auf Low, für Daten auf High gelegt und dann die 8 Bit Befehl/Daten seriell über Pin4 (clock) und Pin21 (data) an das Display gesendet.Aufbau der Elektronik
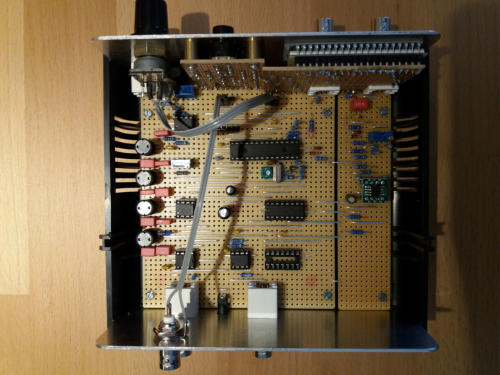
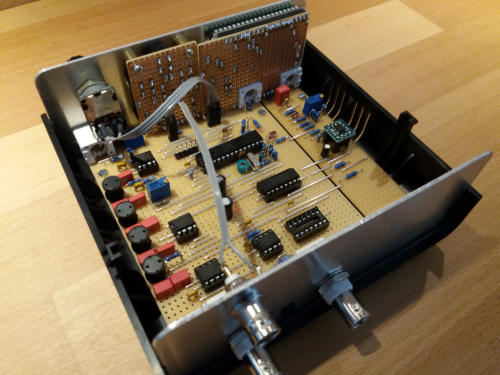
Ich habe die gesamte Schaltung auf Streifenrasterplatinen aufgebaut (siehe auch Sonstiges => Streifenrasterplatinen). Die Platinen für das Display und die Taster sind mit Drahtwinkeln direkt mit der Hauptplatine verlötet. Die Platine für das Display ist zusätzlich mit der Eingangsstufenplatine des Frequenzzählers verlötet, diese wiederum über 4 Drahtbrücken mit der Hauptplatine ( GND, +5V, TTL Signal, Analog Signal). Die Front- und Rückseitenplatten des Gehäuses sind durch 1,5mm Aluminiumplatten ersetzt, da ich das Gehäuse schon mal verwendet hatte. Zusätzlich bringen die Aluminiumplatten deutlich mehr Stabilität. In den Ausschnitt für das Display ist eine 3mm Plexiglasscheibe eingesetzt. Da der Abstand der Platinen zum Gehäuseboden nur ca. 4mm beträgt, müssen in der Gehäuseunterschale die vorhandenen Befestigungspunkte entfernt werden. Das Platinenlayout, ein Bestückungsplan, eine Zeichnung für Leiterbahnunterbrechungen, sowie die Stückliste befinden sich im Download Ordner am Ende der Seite. Nachfolgend noch einige Fotos des Aufbaus.Abgleicharbeiten
Die erforderlichen Abgleicharbeiten erfolgen entweder über Trimmer oder softwaremäßig über das Einstellungsmenü. Für die Einstellungen ist ein Voltmeter ausreichend, ein Oszilloskop kann hilfreich sein. Eine detaillierte Anleitung befindet sich im Downloadordner am Ende der Seite.Bedienung
Die Bedienung erfolgt über die Taster Ta1-Ta6. Über die Menü Taste (Ta1) wird das Menü aufgerufen, über das die Einstellungen vorgenommen werden. Die einzelnen Menüpunkte werden mit den Up/Down Tasten angezeigt. Mit der OK Taste wird der entsprechende Menüpunkt aufgerufen. Innerhalb des Untermenüs wird der Cursor mit den Rechts/Links Tasten bewegt und der Wert mit den Up/Down Tasten verändert. Mit der OK Taste werden die Einstellungen übernommen und das Menü verlassen, mit der Menü Taste geht man eine Menüstufe zurück, ohne Änderungen zu übernehmen. Der Menüpunkt 4.Einstellungen hat zusätzliche Untermenüs für die in der Regel einmaligen Grundeinstellungen des Geräts. Alle gewählten Einstellungen werden in dem internen EEPROM gespeichert und beim Einschalten des Gerätes geladen, d.h. das Gerät startet mit den zuletzt benutzten Einstellungen. Eine detaillierte Beschreibung der Einstellmöglichkeiten befindet sich im Downloadordner am Ende der Seite.Download
Der unten aufgeführte Ordner beinhaltet alle relevanten Dateien, die für den Nachbau benötigt werden (siehe auch Sonstiges => Zeichnungen). FGZ_Einfach_P18F25K22.zip FGZ_Einfach_P18F2550.zip 26.07.20 Seite erstellt 18.08.20 Abschnitt “Erzeugung der DDS Signale” hinzugefügt, Software Fehler korrigiert, Ordner “FGZ_Einfach_P18F2550.zip” hinzugefügt.
Einfacher DDS Signalgenerator / Frequenzzähler